
 项目商机
项目商机 知识锦囊
知识锦囊 数智工具
数智工具 专家顾问
专家顾问 机器人互动营销解决方案
机器人互动营销解决方案 品牌私域会员服务站系统
品牌私域会员服务站系统 AI大模型数字人员工方案
AI大模型数字人员工方案 企微SCRM客户管理系统
企微SCRM客户管理系统 新零售电商平台解决方案
新零售电商平台解决方案 全员营销电子名片系统
全员营销电子名片系统 AIGC绘画打卡机引流方案
AIGC绘画打卡机引流方案 门店私域会员服务小站
门店私域会员服务小站 公司简介
公司简介 联系合作
联系合作
 复制链接
复制链接 微信
微信 QQ
QQ2025年1月11日,OpenLoong项目正式入选开放原子开源基金会的支持项目,这一消息标志着人形机器人领域进入了一个新的发展阶段:“人人”都可以制造人形机器人。
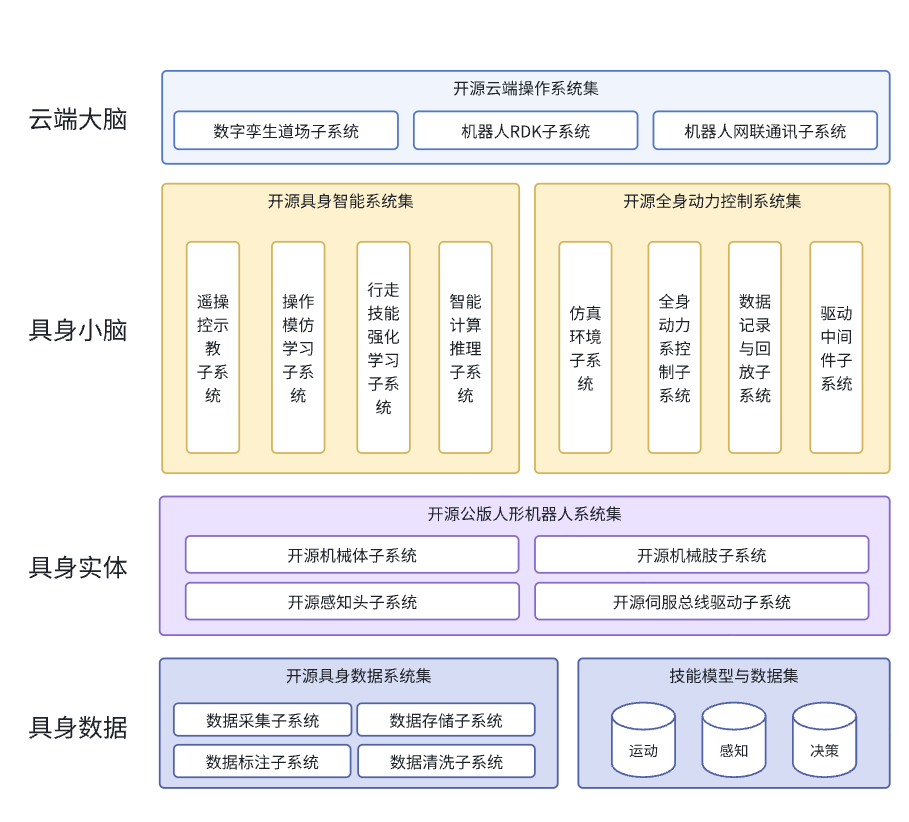
“OpenLoong”是上海人形机器人制造业创新中心倾力打造的全球首个全尺寸人形机器人开源社区,将上线开源全尺寸-强对标人的公版机软硬件设计方案、具身智能操作系统、人形机器人道场,为开发者、研究者和人形机器人爱好者提供一个全面、深入且易于理解的资源库,推动人形机器人整机企业、核心部组件厂商、科研院校、具身技术研发团队融入开源人形机器人生态。

OpenLoong项目通过开放原子开源基金会的技术监督委员会(TOC)评审,证明了其在技术实力和发展潜力方面的认可。该项目已经开源了包括公版硬件系统、全身动力学控制系统和语料数据集在内的多种技术资料,为机器人整机企业、核心部件商、科研院校以及技术研发团队提供了丰富的资源。
OpenLoong社区目前已有超过2300名注册用户,每月举办至少两次线下或线上活动,成为全球领先的人形机器人开源社区之一。
OpenLoong项目在开放原子开源基金会的支持下,旨在推动全球人形机器人技术的开源合作与创新,具体计划和目标包括以下几个方面:
技术开源与共享:OpenLoong项目已经开源了公有硬件系统、全身动力学控制系统和语料数据集,构建了高水平的人工智能生态,为全球人形机器人技术的合作与创新提供了新的平台。
社区建设:OpenLoong社区已经吸引了大量用户参与,发布超过70篇技术文章,并收集了150个机器人产品信息。此外,社区还定期举办线上线下活动,促进交流与合作。
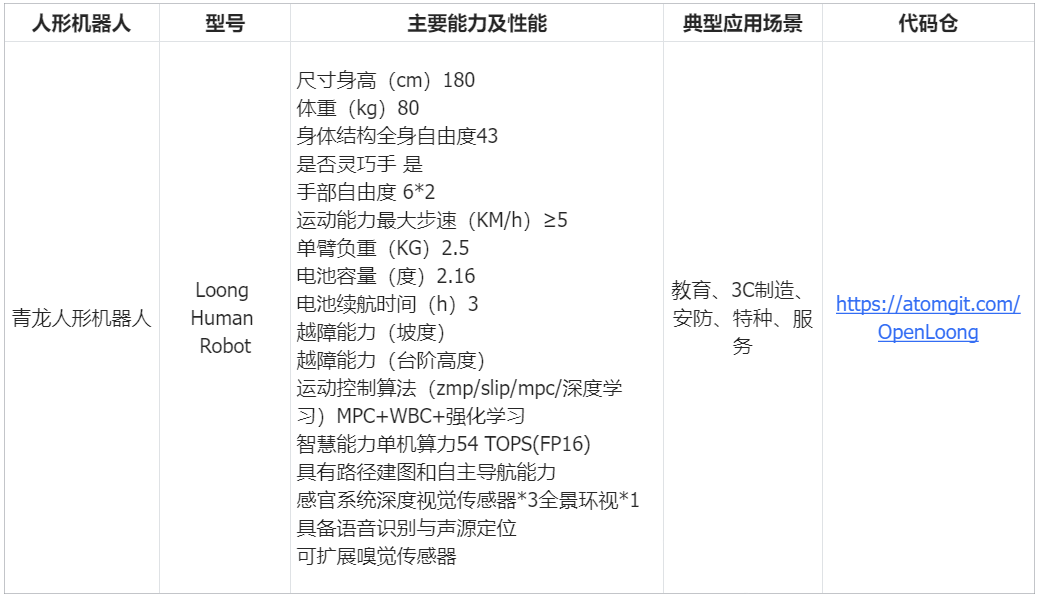
推动行业突破:OpenLoong项目通过开源“青龙”机器人的全部硬件设计(包括各部件的硬件、驱动等设计)和全身动力学控制软件系统(包括算法模型、仿真与部署工具框架),解决了人形机器人行业面临的高硬件门槛、软件算法难、软硬件协同难、知识积累难、人才聚集难和安全应用难等“一高五难”问题。
产业化与规模化效应:OpenLoong项目通过开源模式,实现了产业化和规模化效应,推动了人形机器人技术的快速应用和推广。这不仅有助于降低研发成本,还能加速技术的商业化进程。
支持上海机器人产业发展:上海将根据“模塑申城”实施方案,持续构建人形机器人开源开放生态系统,依托OpenLoong社区,汇聚全球智慧,攻克难题,推动具身智能数据的共享与建设,加速人形机器人技术在重点领域的垂直应用,打造上海人形机器人产业高地。
OpenLoong项目如何解决人形机器人行业面临的硬件门槛高、软硬结合难、知识积累难等问题?
硬件门槛高:OpenLoong降低了进入人形机器人领域的硬件开发门槛。这意味着更多的开发者和企业可以使用这些标准化的硬件组件进行开发,从而降低了硬件研发的成本和复杂性。
软硬结合难:项目提供了全身动力学控制系统和具身智能操作系统,这些工具和框架使得软硬件的结合变得更加容易。通过提供标准化的软硬件接口和协议,OpenLoong项目简化了软硬件集成的过程,使得开发者能够更加专注于算法和应用的开发,而不是底层硬件的适配。
知识积累难:OpenLoong项目提供了丰富的语料数据集和开发工具。促进了技术的共享和交流,加速了知识的积累和传播。开发者可以通过访问这些资源,快速学习和掌握人形机器人技术。
人才聚集难:OpenLoong项目通过建立一个全球化的开源社区,吸引了来自世界各地的人才参与。通过开源全尺寸、强对标的人公版软硬件设计方案,降低了开发门槛和成本,从而吸引了更多的人才加入到人形机器人技术的研发中。
安全应用难:通过开源社区的协作和共享,OpenLoong项目能够更好地收集和分析安全应用中的问题,并通过社区的力量共同解决这些问题,从而提高人形机器人应用的安全性。
OpenLoong项目的公版硬件系统、全身动力学控制系统和语料数据集的技术细节和应用案例有哪些?
OpenLoong项目是一个致力于推动人形机器人技术开源与创新的平台,其核心组成部分包括公版硬件系统、全身动力学控制系统和语料数据集。以下是这些部分的技术细节和应用案例:
公版硬件系统(OpenLoong Hardware System)
公版硬件系统涵盖了人形机器人的头部、上肢、下肢、躯干和控制等硬件图纸和驱动设计资料。这些资料为开发者提供了详细的硬件架构和组件信息,使得他们能够根据具体需求进行定制化开发。
技术细节:
- 硬件图纸和驱动:包括详细的机械结构图和电子电路图,以及用于控制各部件的软件驱动程序。
- 标准化总线分布式数据通信协议栈:采用Ethanet分布式总线数据通信协议栈,确保高动态控制系统的稳定性和高效性。
应用案例:
- 定制化开发:开发者可以根据项目需求对公版硬件进行裁剪或改进,例如针对特定任务优化机械臂或传感器配置。
- 教育和研究:高校和研究机构可以利用这些硬件系统进行教学和科研,培养更多机器人技术人才。
全身动力学控制系统(OpenLoong Dynamic Control System)
全身动力学控制系统基于算法模型实现,包括算法、仿真与部署框架工具链。该系统通过精确的动力学控制算法,确保人形机器人在行走、抓取、搬运等复杂任务中的稳定性和灵活性。
技术细节:
- 算法模型:包括用于模拟和控制机器人运动的数学模型和算法。
- 仿真与部署框架:提供了一套完整的工具链,用于仿真测试和实际部署,确保算法在不同环境下的适用性和可靠性。
应用案例:
- 工业应用:在制造业中,全身动力学控制系统可以用于自动化装配线,提高生产效率和精度。
- 服务机器人:在服务业中,如酒店接待、医疗辅助等领域,通过精确的运动控制,提升服务质量和用户体验。
语料数据集(OpenLoong Dataset)
语料数据集包含了人形机器人开展行走、抓取、搬运等运动的数据集。这些数据集为机器学习和人工智能算法提供了丰富的训练样本,有助于提升机器人智能水平。
技术细节:
- 运动数据:包括各种运动模式下的传感器数据和执行器反馈数据。
- 标注数据:对运动数据进行标注,提供训练模型所需的目标信息。
应用案例:
- 智能决策:通过分析大量运动数据,训练出能够自主决策的智能算法,使机器人能够在复杂环境中自主导航和执行任务。
- 行为学习:利用标注数据集训练机器人学习特定行为模式,如抓取不同形状物体的方法。
OpenLoong社区的活动形式和内容是什么,如何促进技术的传播与应用?
OpenLoong社区的活动形式和内容主要包括线上和线下两种形式。根据,该社区每月组织至少2次线上线下活动,为开发者提供交流平台。这些活动可能包括技术分享、研讨会、工作坊等形式,旨在促进技术的传播与应用。
为了促进技术的传播与应用,OpenLoong社区采取了以下措施:
技术文档和资源库:社区内收录了70多篇技术文章和150多个机器人产品信息,为开发者提供了丰富的技术资源和参考材料。
开源平台:OpenLoong社区在GitLab上开源了多个项目,如OpenLoong-Control、OpenLoong-Hardware、gym-loong、OpenMiniRobot、OpenLoongMini等,这些开源项目为开发者提供了实际操作的代码和框架,降低了研发成本,加速了技术的传播与应用。
全球开发者聚集:依托OpenLoong社区,汇聚了全球的开发者、研究者和爱好者,共同攻克具身智能数据的建树与共享,加速人形机器人技术在重点垂直领域的深度应用。
产业协同发展:通过技术融合、标准化和产业协同发展,OpenLoong社区推动了人形机器人产业的规模化和集聚化,降低了研发成本,加速了技术的传播与应用。
创新高地建设:上海正致力于构建上海人形机器人开源开放生态系统,依托OpenLoong社区,打造上海人形机器人产业高地,推动人形机器人技术的创新与发展。
开源内容
公版硬件系统(OpenLoong Hardware System):包含了人形机器人的头部、上肢、下肢、躯干、控制等硬件图纸、驱动等设计资料。
全身动力学控制系统(OpenLoong Dynamic Control System):包括基于全身动力学控制实现的算法模型,包括算法、仿真与部署框架工具链。
语料数据集(OpenLoong Dataset):包含了人形机器人开展行走、抓取、作业、搬运等运动的数据集。
项目地址
OpenLoong已在开放原子开源基金会旗下AtomGit协作平台上开源。https://atomgit.com/openloong
组织中包括以下仓库:
全身动力学控制软件包https://atomgit.com/openloong/openloong-dyn-control
开源人形机器人硬件系统https://atomgit.com/openloong/OpenLoongHardware
开源人形机器训练平台https://atomgit.com/openloong/gymloong
开源通用人形机器人道场原型https://atomgit.com/openloong/OpenMiniGym
大模型技能调度框架https://atomgit.com/openloong/OpenLoongBrain
OpenLoong项目开发者文档https://www.openloong.org.cn/cn/developer
OpenLoong开发者论坛https://forum.openloong.org.cn/







